BENDERMAG.RU
Радиодетали и ардуино.05.11.2013 делаем цифровой компас HMC5883L
 +
+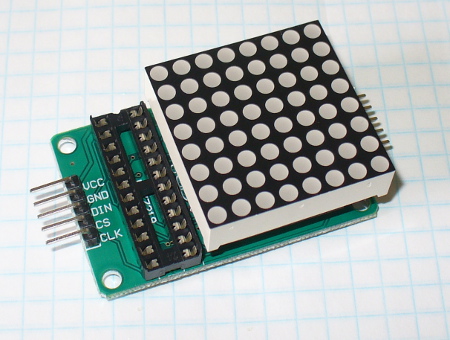
компас и 8х8 светодиодный матричный дисплей
нужно скачать библиотеки LedControl и HMC5883L
Фото и видео скоро будут =)
наш код :
#include <avr/pgmspace.h>
#include <LedControl.h>
#include "Wire.h"
#include "HMC5883L.h"
HMC5883L compass; // +3.3 gnd scl(аналоговый вход 5) sda(аналоговый вход 4)
// *CONSTANTS
const int DIN = 8; //DataIn pin (18)
const int CLK = 10; //Clock pin (17)
const int LOAD = 9; //Load pin (16)
const int numDevices = 2; //Number of MAX7219 LED Driver Chips (1-8)
const long scrollDelay = 70;
unsigned long bufferLong [20] = {1}; //Buffer for scrolling text
LedControl lc=LedControl(DIN,CLK,LOAD,numDevices);
void setup(){
for (int x=0; x<numDevices; x++){
lc.shutdown(x,false); //The MAX72XX is in power-saving mode on startup
lc.setIntensity(x,8); // Set the brightness to default value
lc.clearDisplay(x); // and clear the display
Wire.begin();
compass = HMC5883L(); // создаем экземпляр HMC5883L библиотеки
setupHMC5883L();
}
}
void loop(){
float heading = getHeading();
int y = map(heading, 0, 360, 0, 8);
delay(100);
int ycom;
int xcom;
lc.setLed(0,0,0,true);
if(y==0)
{
lc.setLed(0,1,1,true);
lc.setLed(0,2,2,true);
lc.setLed(0,3,3,true);
lc.setLed(0,3,4,true);
lc.setLed(0,4,3,true);
lc.setLed(0,4,4,true);
}
else
{
lc.setLed(0,1,1,false);
lc.setLed(0,2,2,false);
}
lc.setLed(0,7,7,true);
if(y==2)
{
lc.setLed(0,6,1,true);
lc.setLed(0,5,2,true);
}
else
{
lc.setLed(0,6,1,false);
lc.setLed(0,5,2,false);
}
lc.setLed(0,7,0,true);
if(y==4)
{
lc.setLed(0,6,6,true);
lc.setLed(0,5,5,true);
}
else
{
lc.setLed(0,6,6,false);
lc.setLed(0,5,5,false);
}
lc.setLed(0,0,7,true);
if(y==6)
{
lc.setLed(0,2,5,true);
lc.setLed(0,1,6,true);
}
else
{
lc.setLed(0,2,5,false);
lc.setLed(0,1,6,false);
}
// рамка север
lc.setLed(0,0,2,true);
lc.setLed(0,0,3,true);
lc.setLed(0,0,4,true);
lc.setLed(0,0,5,true);
if(y==7){
lc.setLed(0,1,3,true);
lc.setLed(0,1,4,true);
lc.setLed(0,1,5,true);
lc.setLed(0,1,2,true);
}
else
{
lc.setLed(0,1,2,false);
lc.setLed(0,1,3,false);
lc.setLed(0,1,4,false);
lc.setLed(0,1,5,false);
}
// рамка юг
lc.setLed(0,7,2,true);
lc.setLed(0,7,3,true);
lc.setLed(0,7,4,true);
lc.setLed(0,7,5,true);
if(y==3){
lc.setLed(0,6,2,true);
lc.setLed(0,6,3,true);
lc.setLed(0,6,4,true);
lc.setLed(0,6,5,true);
}
else
{
lc.setLed(0,6,2,false);
lc.setLed(0,6,3,false);
lc.setLed(0,6,4,false);
lc.setLed(0,6,5,false);
}
// рамка запад
lc.setLed(0,2,0,true);
lc.setLed(0,3,0,true);
lc.setLed(0,4,0,true);
lc.setLed(0,5,0,true);
if(y==1){
lc.setLed(0,2,1,true);
lc.setLed(0,3,1,true);
lc.setLed(0,4,1,true);
lc.setLed(0,5,1,true);
}
else
{
lc.setLed(0,2,1,false);
lc.setLed(0,3,1,false);
lc.setLed(0,4,1,false);
lc.setLed(0,5,1,false);
}
// рамка восток
lc.setLed(0,2,7,true);
lc.setLed(0,3,7,true);
lc.setLed(0,4,7,true);
lc.setLed(0,5,7,true);
if(y==5){
lc.setLed(0,2,6,true);
lc.setLed(0,3,6,true);
lc.setLed(0,4,6,true);
lc.setLed(0,5,6,true);
}
else
{
lc.setLed(0,2,6,false);
lc.setLed(0,3,6,false);
lc.setLed(0,4,6,false);
lc.setLed(0,5,6,false);
}
//lc.setLed(0,col,row,false); // выключается светодиод столбец, строка
//delay(10);
}
void setupHMC5883L(){
// инициализация HMC5883L, и проверка наличия ошибок
int error;
error = compass.SetScale(0.88); // чувствительность датчика из диапазона: 0.88, 1.3, 1.9, 2.5, 4.0, 4.7, 5.6, 8.1
if(error != 0) Serial.println(compass.GetErrorText(error)); // если ошибка, то выводим ее
error = compass.SetMeasurementMode(Measurement_Continuous); // установка режима измерений как Continuous (продолжительный)
if(error != 0) Serial.println(compass.GetErrorText(error)); // если ошибка, то выводим ее
}
float getHeading(){
// считываем данные с HMC5883L и рассчитываем направление
MagnetometerScaled scaled = compass.ReadScaledAxis(); // получаем масштабированные элементы с датчика
float heading = atan2(scaled.YAxis, scaled.XAxis); // высчитываем направление
// корректируем значения с учетом знаков
if(heading < 0) heading += 2*PI;
if(heading > 2*PI) heading -= 2*PI;
return heading * RAD_TO_DEG; // переводим радианы в градусы
}